

Humanoids
Best if you need human-like robots capable of multi-modal interaction, real-world automation, or advanced research and teaching applications.

Quadrupeds
Best for projects that demand terrain-flexible mobility—whether in STEM classrooms, robotics competitions, outdoor exploration, or inspection tasks.

Arm's and Manipulators
The go-to for precise, programmable control in factories, research labs, or when adding dexterity to mobile robotic systems.
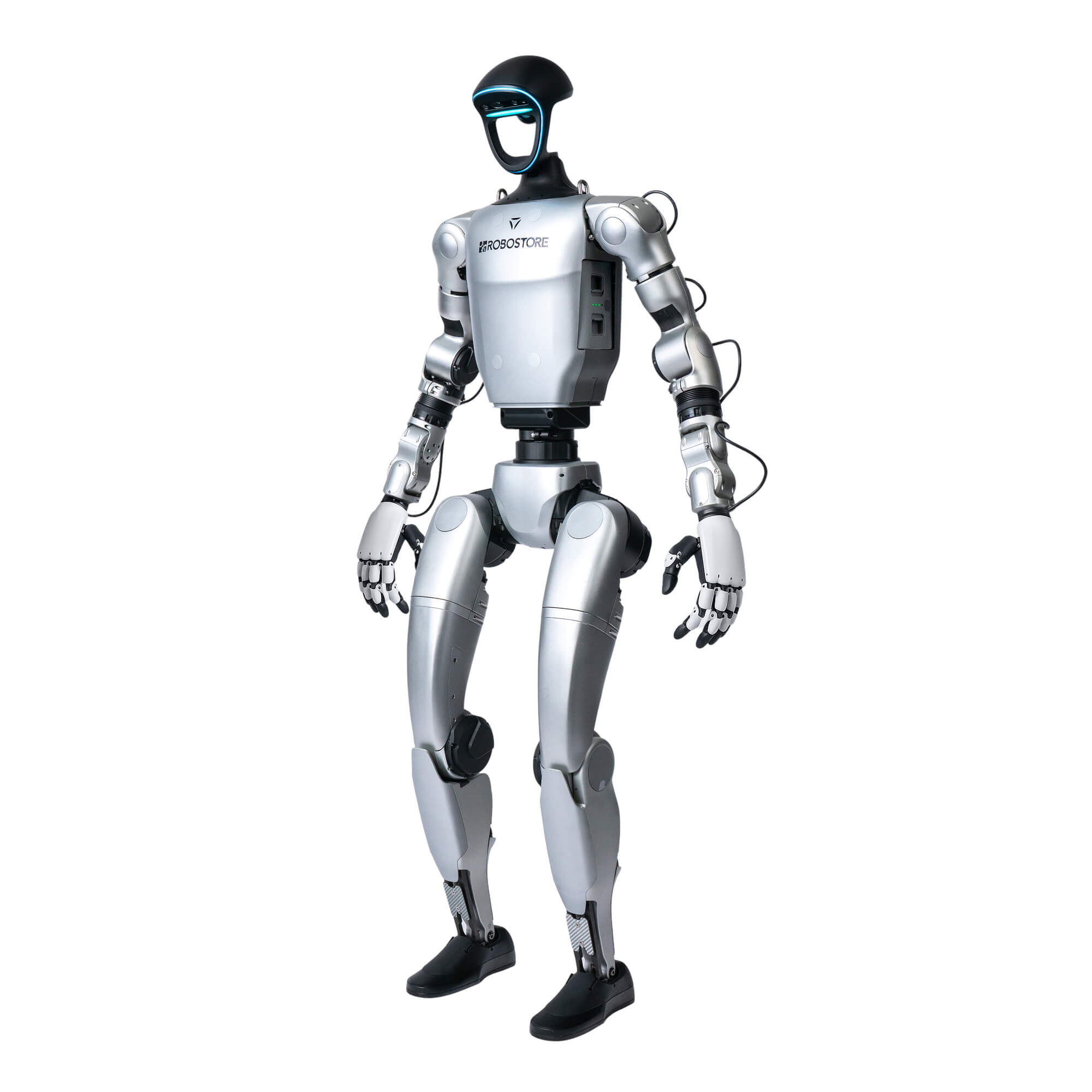
Humanoids
Explore humanoid robots built for real-world versatility—from research and teaching to autonomous task automation. With advanced motion, perception, and multi-modal control, they bring human-like interaction into robotic form.





Hand Type

Degrees of Freedom

Not-Supported

Max Joint Torque

Max Arm Payload

Quick-Release Battery




Hand Type
Degrees of Freedom
Supported

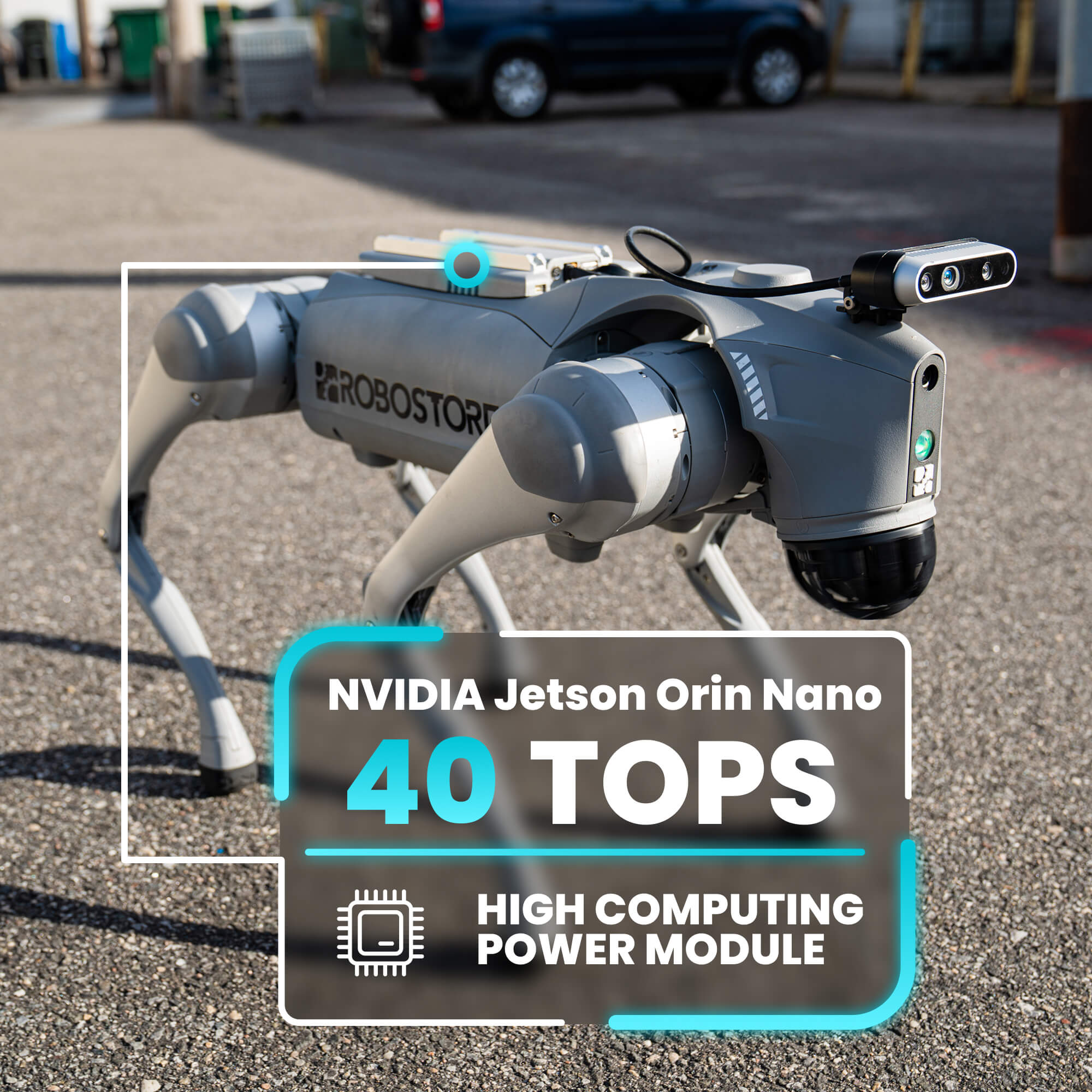
NVIDIA Jetson Orin
Max Joint Torque
Max Arm Payload




Unitree G1 (U2) EDU Plus Robotic Humanoid
Hand Type
Degrees of Freedom
Supported
NVIDIA Jetson Orin
Max Joint Torque
Max Arm Payload




Hand Type
Degrees of Freedom
Supported
NVIDIA Jetson Orin
Quick-Release Battery

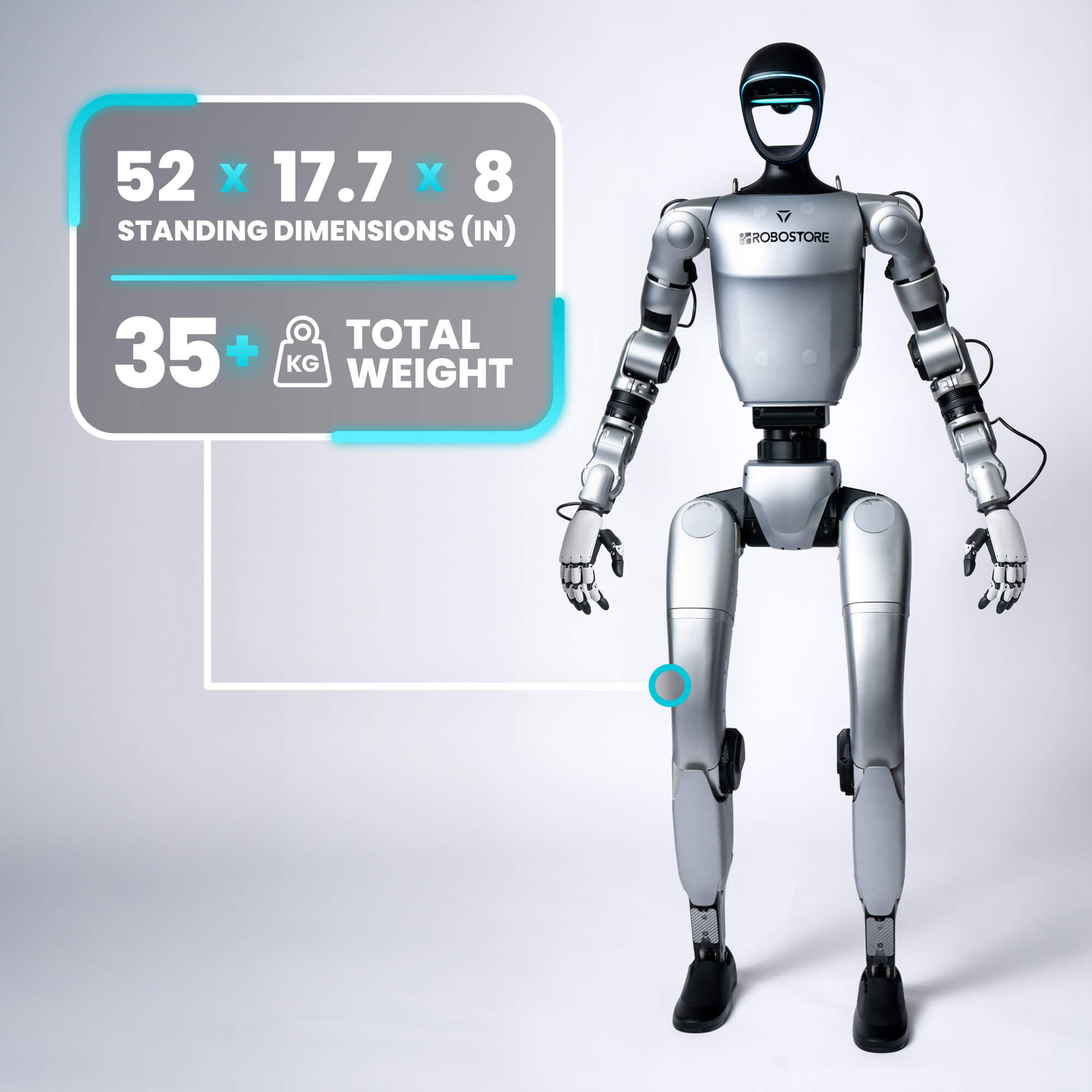
Weight (with Battery)




Hand Type
Degrees of Freedom
Supported
NVIDIA Jetson Orin
Max Joint Torque
Max Arm Payload


Hand Type
Degrees of Freedom
Supported
NVIDIA Jetson Orin
Max Joint Torque
Max Arm Payload
Hand Type
Degrees of Freedom
Supported
NVIDIA Jetson Orin
Max Joint Torque
Max Arm Payload



G1 Comp Athletic Robotic Humanoid
Max Joint Torque
NVIDIA Jetson Orin
Degrees of Freedom
Degrees of Freedom
Max Arm Payload
Quick-Release Battery


Degrees of Freedom
Degrees of Freedom

Top Speed
Weight (with Battery)
User Development
Platform Function
Degrees of Freedom
Degrees of Freedom
Top Speed
Weight (with Battery)
User Development
Platform Function




Not-Supported
Degrees of Freedom
Degrees of Freedom
Degrees of Freedom
Hand Type
Weight (with Battery)




NVIDIA Jetson Orin
Hand Type
Degrees of Freedom
Supported
Degrees of Freedom
Degrees of Freedom
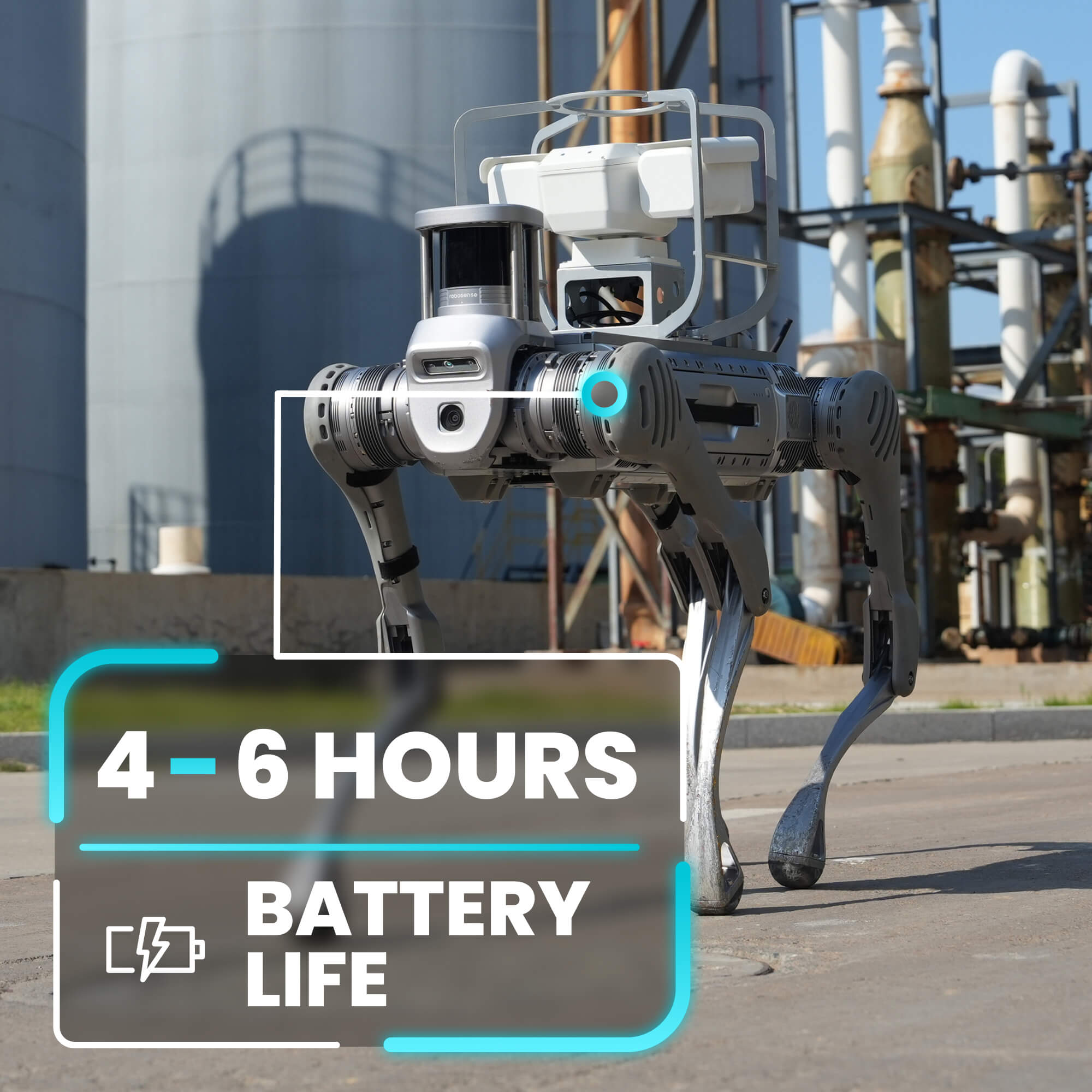
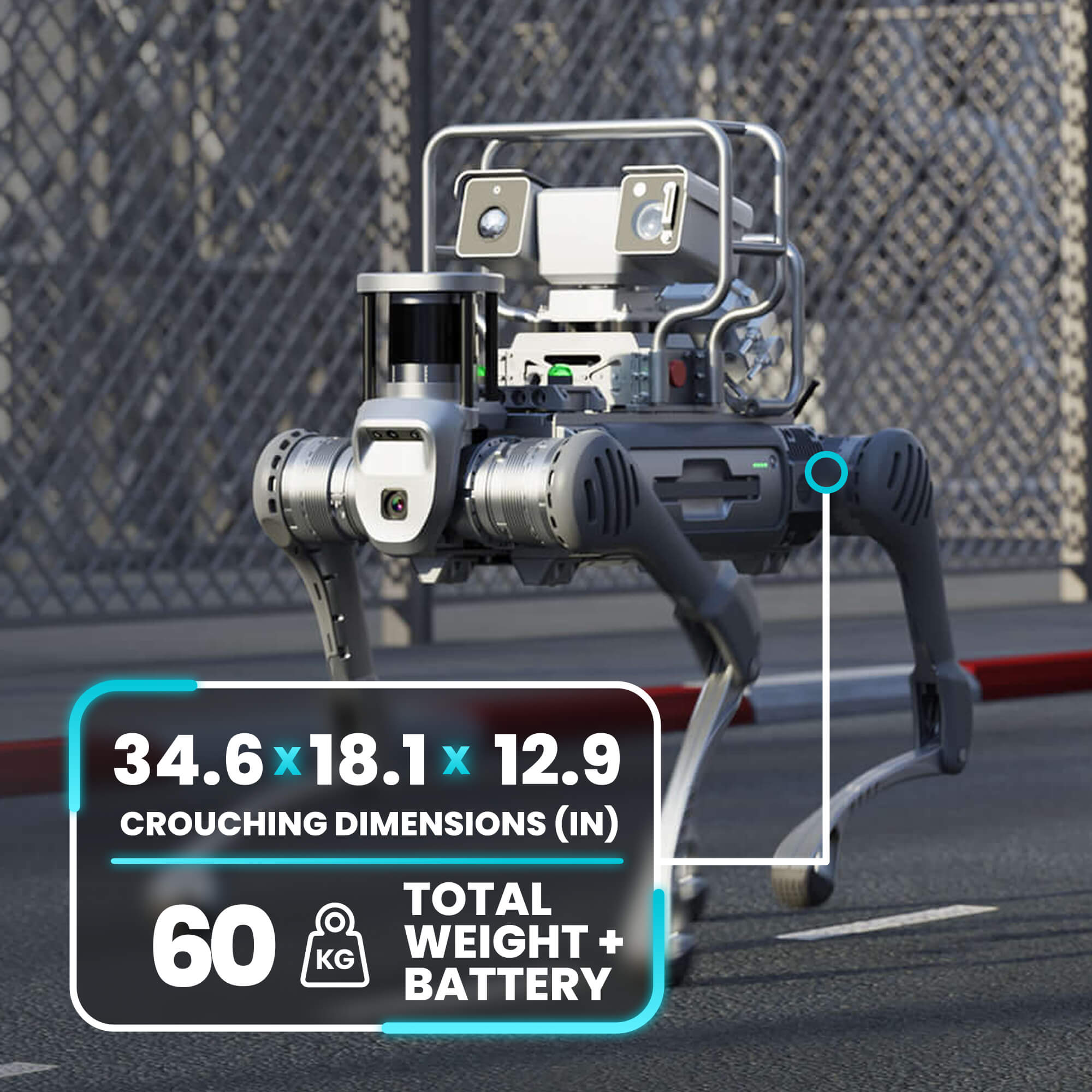
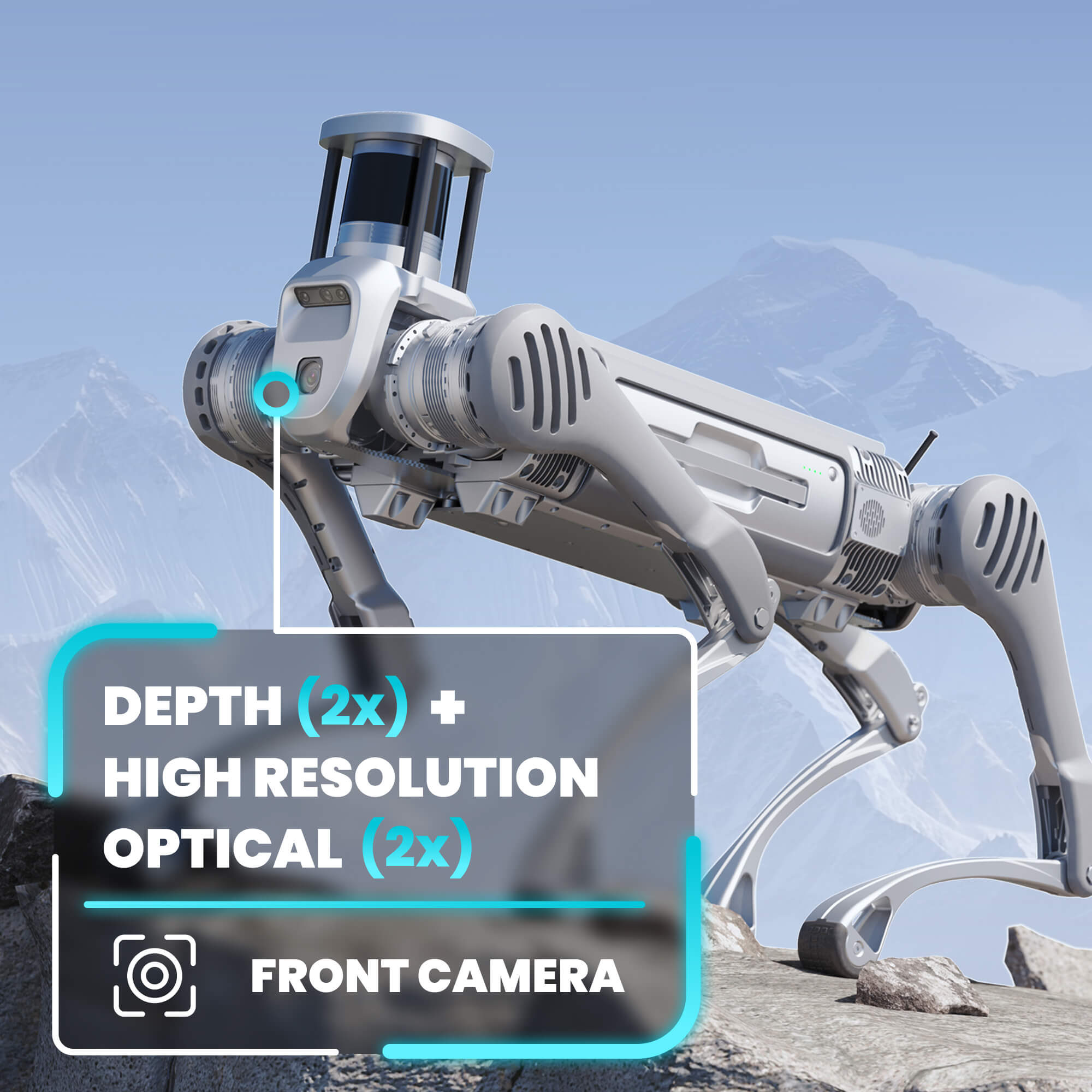
Quadrupeds
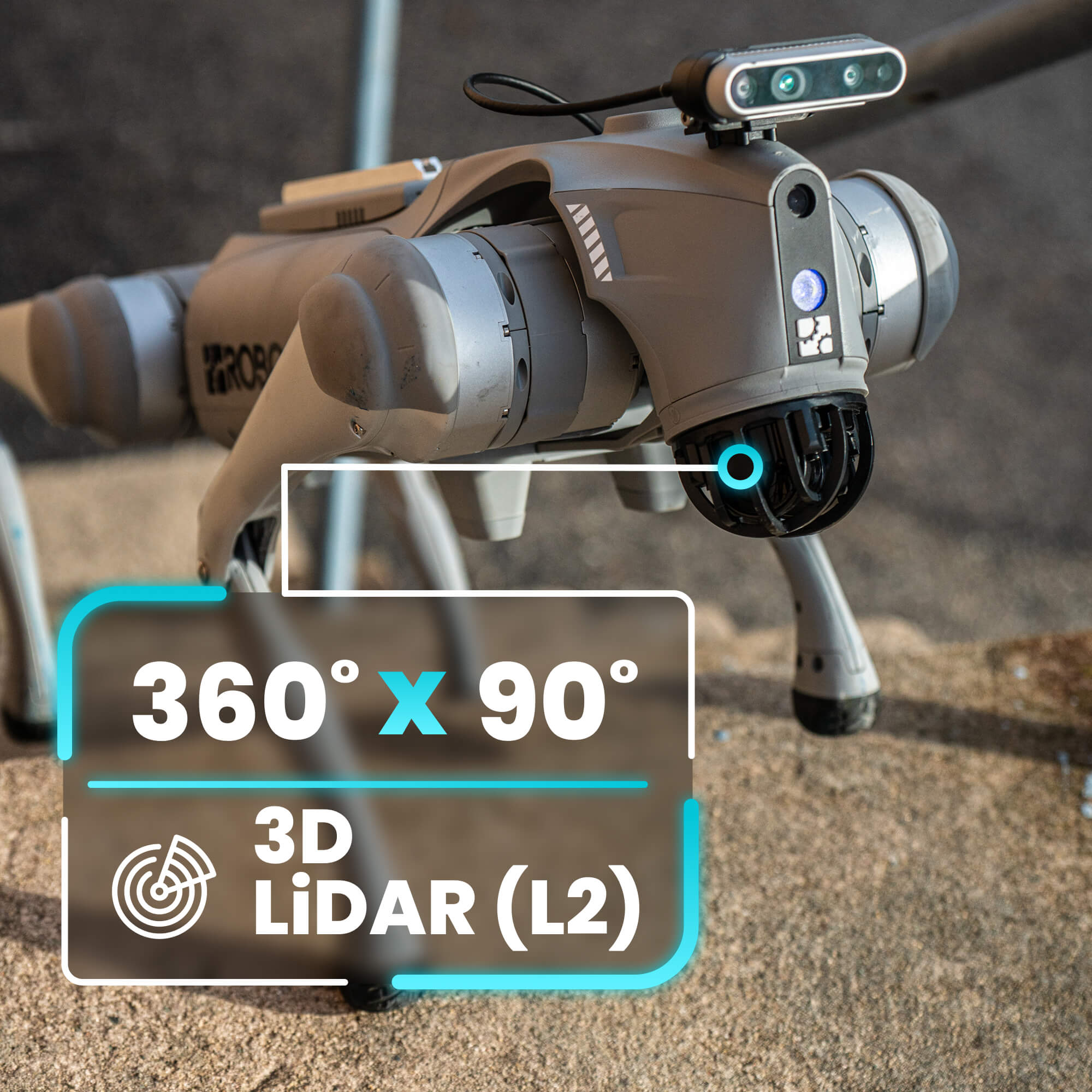
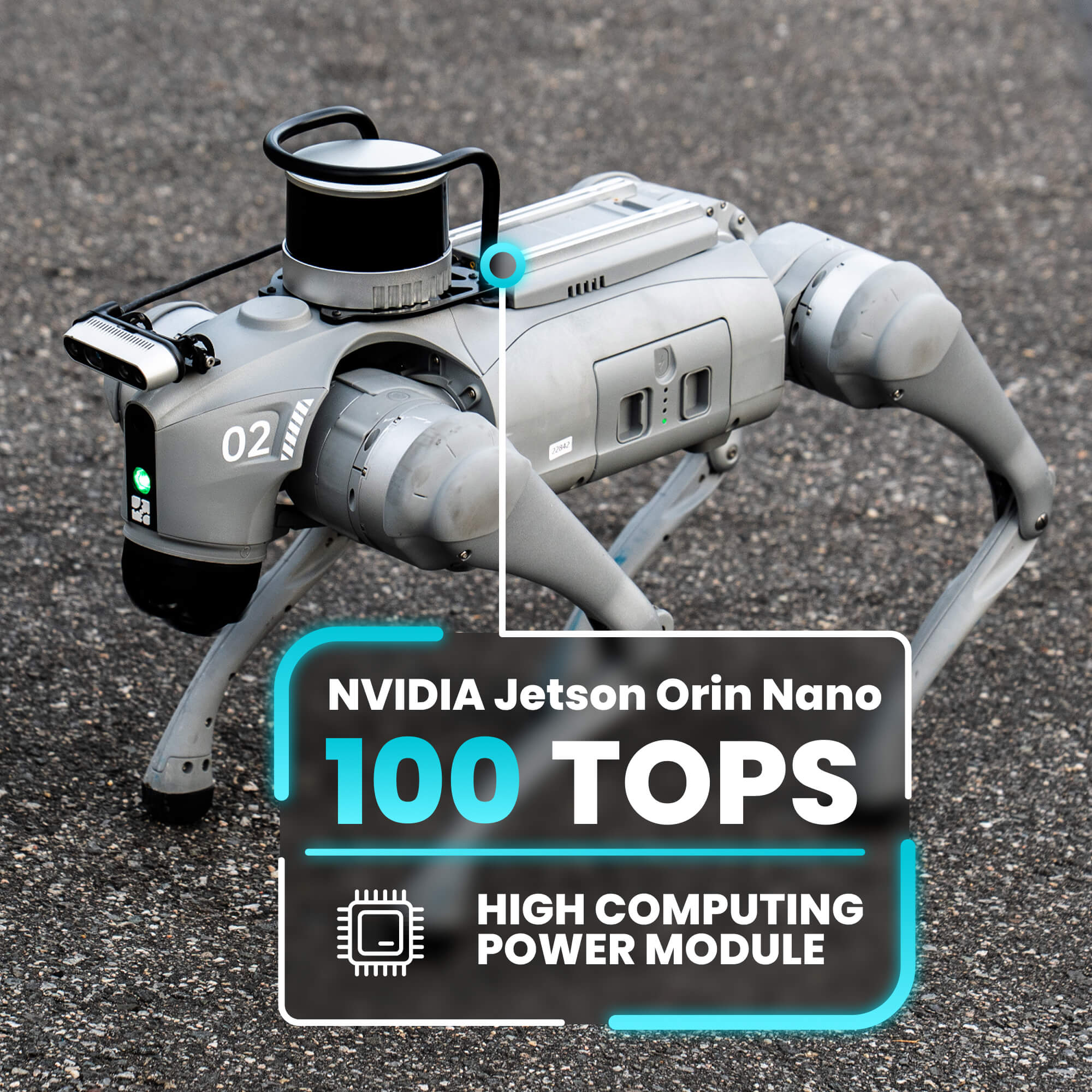
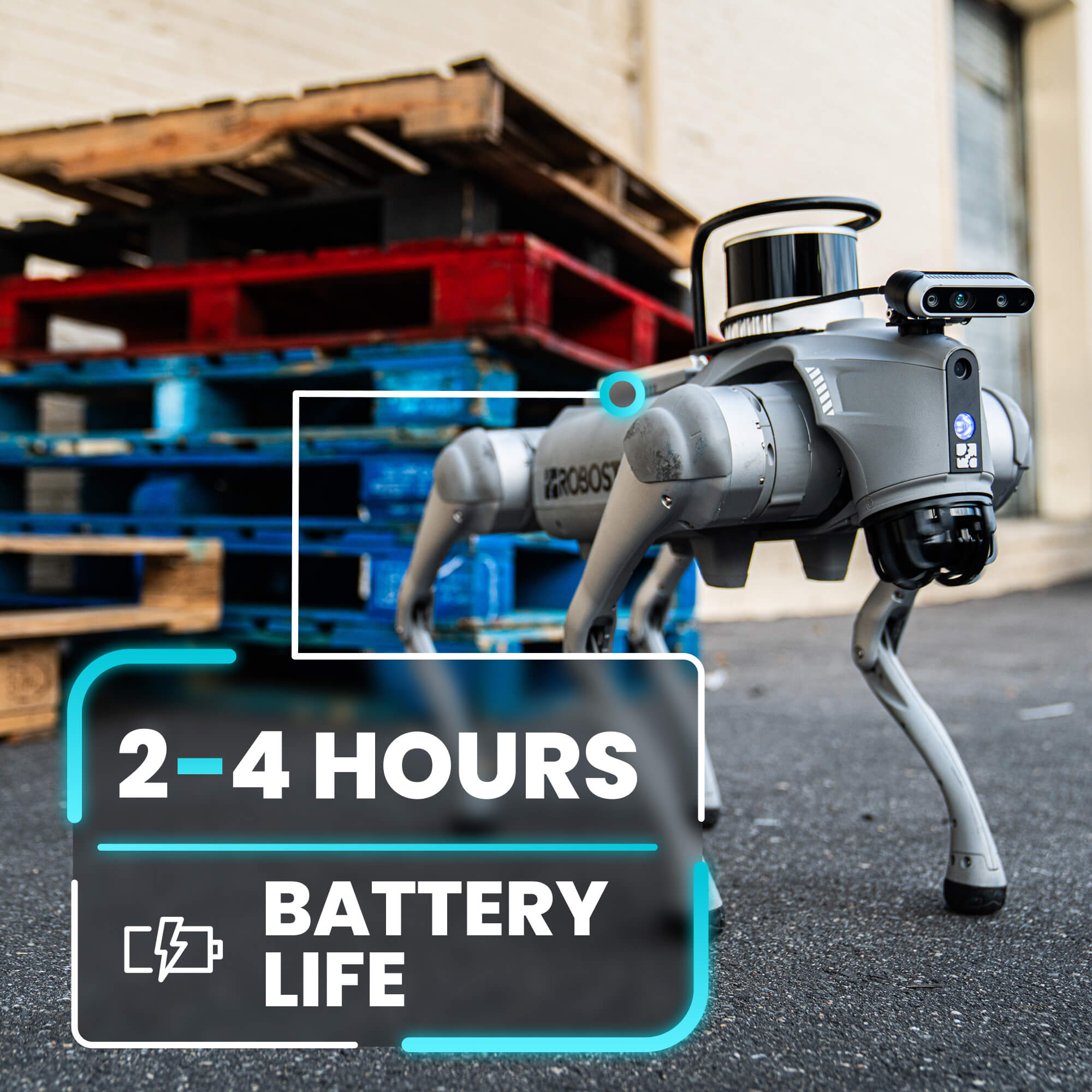
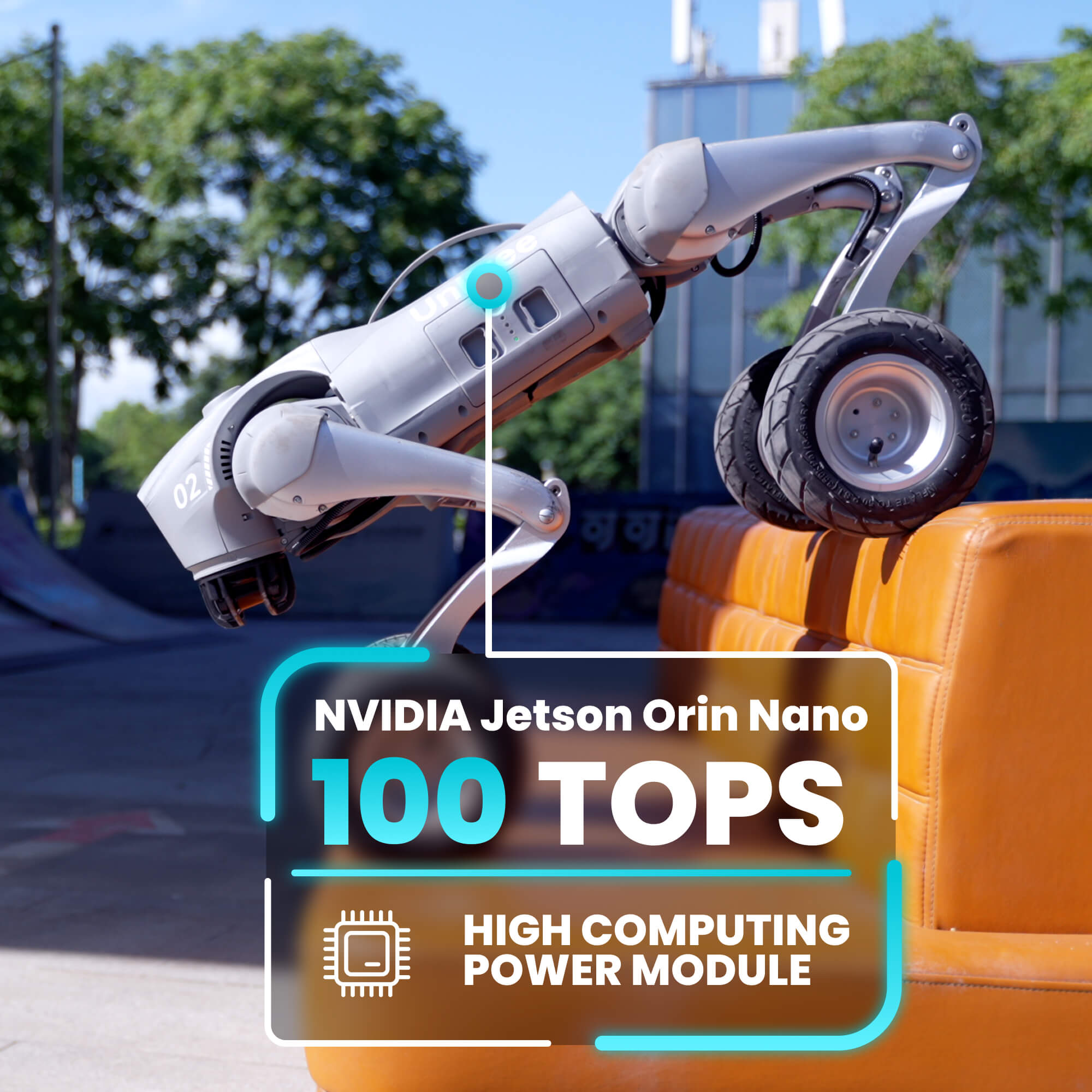
Browse high-performance quadruped robots with dynamic movement and real-world adaptability. Designed for everything from STEM programs to industrial fieldwork, they offer unmatched stability and mobility across terrain.




Unitree Go2 Pro AI Quadruped Robot Dog
Not-Supported
Top Speed
Smart Battery Capacity

Max Climb Angle
Max Joint Torque
Max Payload


Unitree Go2 EDU AI Quadruped Robot Dog
Supported
NVIDIA Jetson Orin
Top Speed
Smart Battery Capacity
Max Climb Angle
Max Joint Torque




Unitree Go2 EDU+ AI Quadruped Robot Dog
Supported
NVIDIA Jetson Orin
Top Speed
Smart Battery Capacity

Knee Joint Motors
Max Joint Torque




Supported
NVIDIA Jetson Orin
Top Speed
Smart Battery Capacity
Max Climb Angle
Max Joint Torque


Supported
NVIDIA Jetson Orin
Smart Battery Capacity
Top Speed
Max Climb Angle
Max Joint Torque



Supported
Max Climb Height
NVIDIA Jetson Orin
Top Speed
Max Climb Angle
Max Joint Torque

Supported
Max Climb Height

External LiDAR
NVIDIA Jetson Orin
Top Speed
Max Climb Angle


Unitree B2 Industrial Quadruped Robotic Dog
Supported
Max Payload (Standing)
Top Speed
Max Jump Distance
Large Capacity Battery
User Development

Supported
Automotive-grade LiDAR
Max Payload (Standing)
Top Speed
Max Jump Distance
Large Capacity Battery

Comprehensive Robotics Education With RoboUniversity
Introducing RoboUniversity — a dedicated curriculum and training program for educational robotics. Developed with professors from Stanford and partners like OpenMind, it offers certified learning for students and developers on Unitree platforms.
From coding fundamentals to advanced robotics integration, RoboUniversity delivers a complete, hands-on education system for the next generation of innovators.
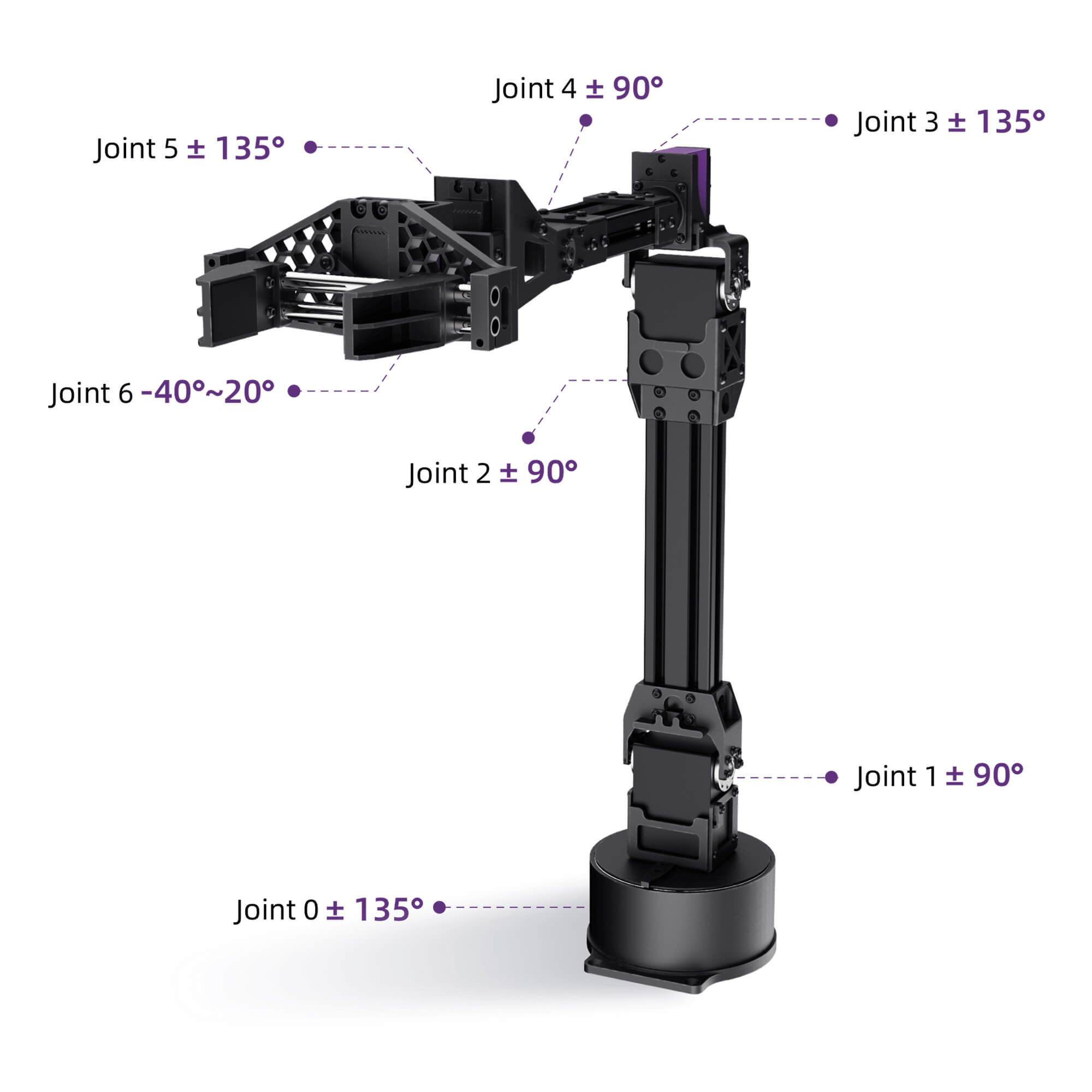
Arm's and Manipulators
Discover robotic arms and end-effectors engineered for precision, dexterity, and modular use. Whether integrated on mobile robots or installed in fixed settings, they deliver capable manipulation for lab, factory, and development environments.




Unitree Z1 Precision Robotic Arms

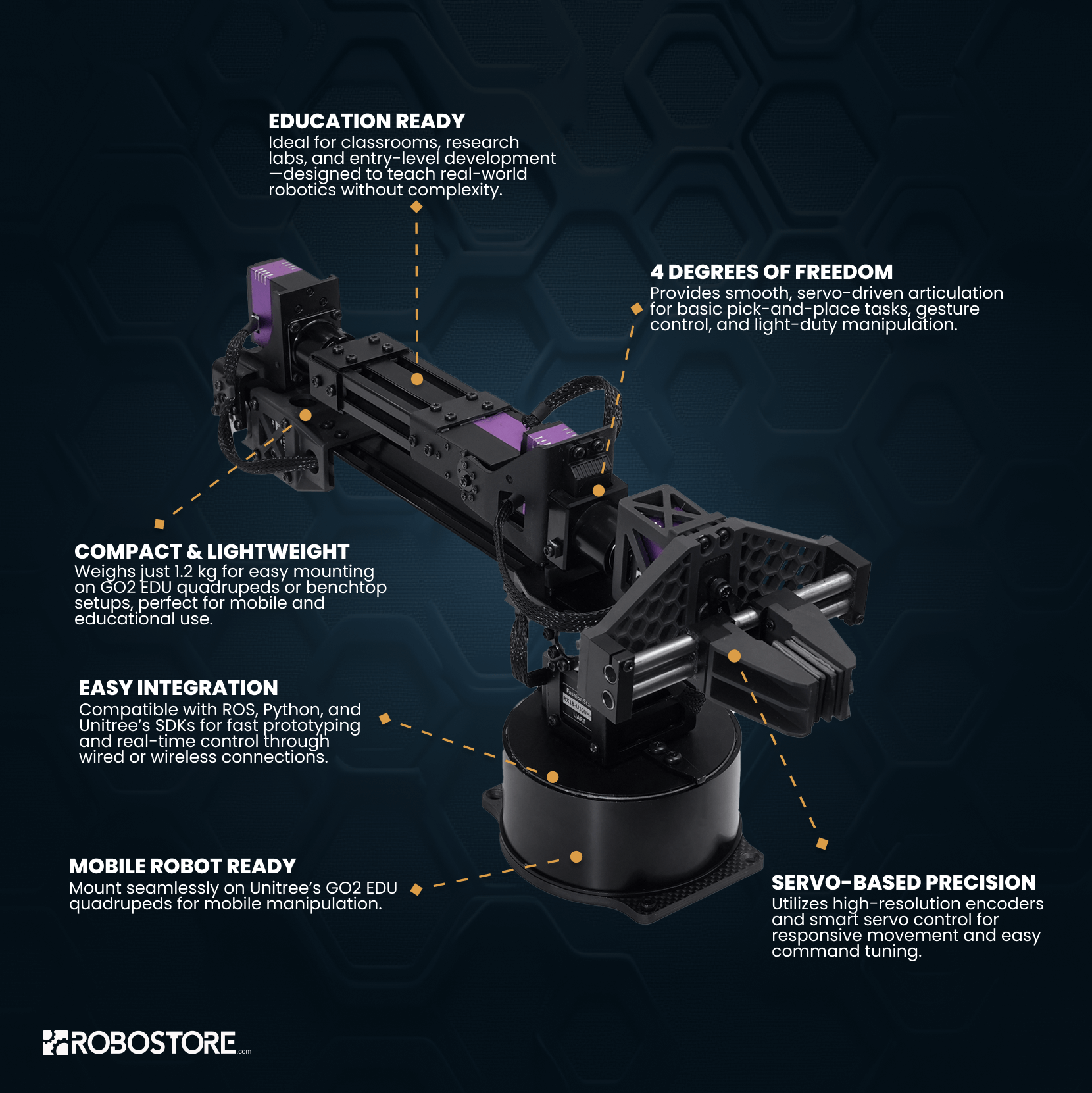
Unitree Go2 Servo Robotic Arm D1


Unitree D1-T Servo Arm Teleoperation Kits









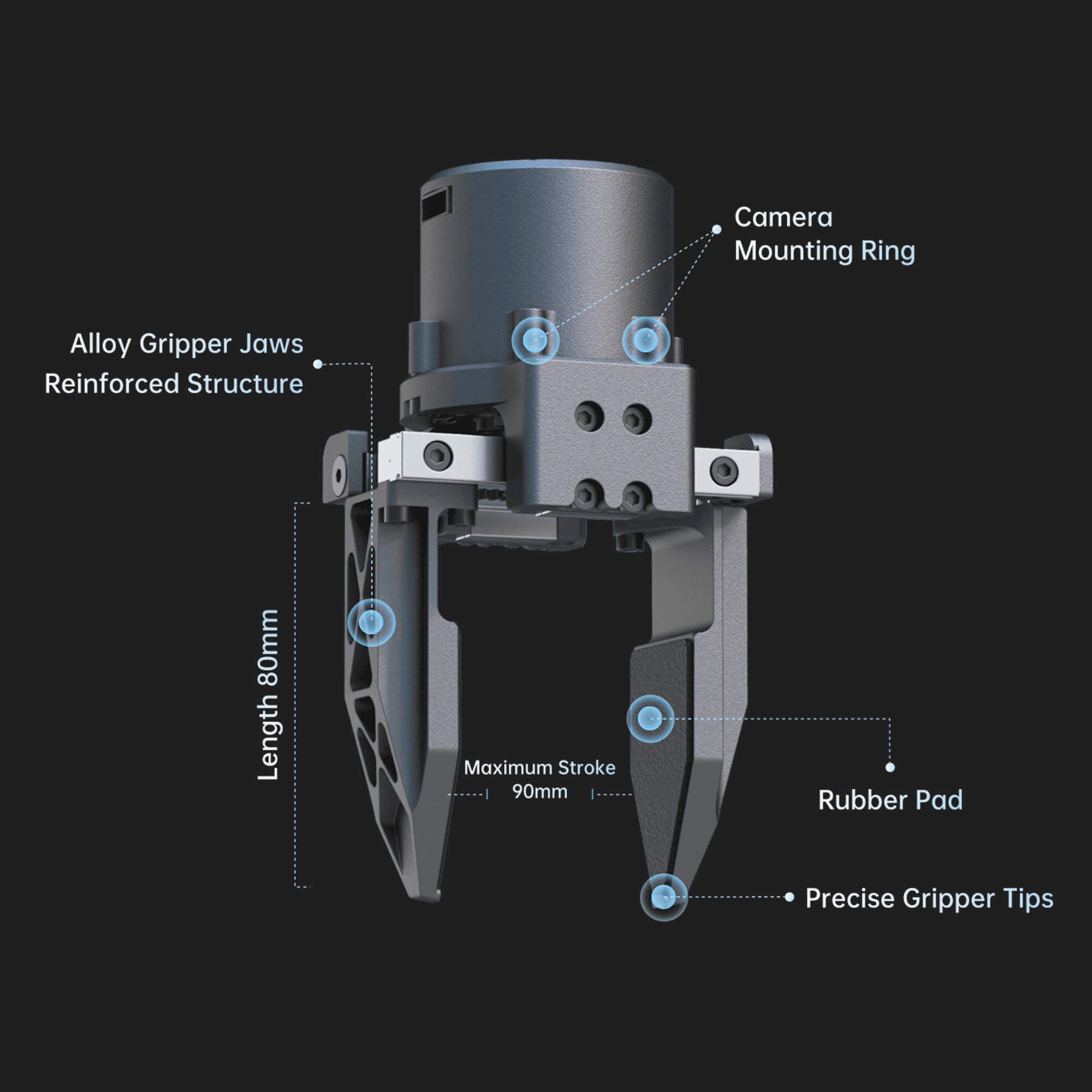

Unitree Dex1-1 V1 Standard Gripper
Shop All Accessories
Enhance your robots with high-capacity batteries, sensing tools, grippers, and control modules. Unitree accessories are designed to upgrade performance, unlock new functionality, and support advanced use cases.




Unitree Go2 AI Robot Dog Battery








Unitree Go1 AI Robot Dog Battery


Unitree GO2 Self-Charging Board