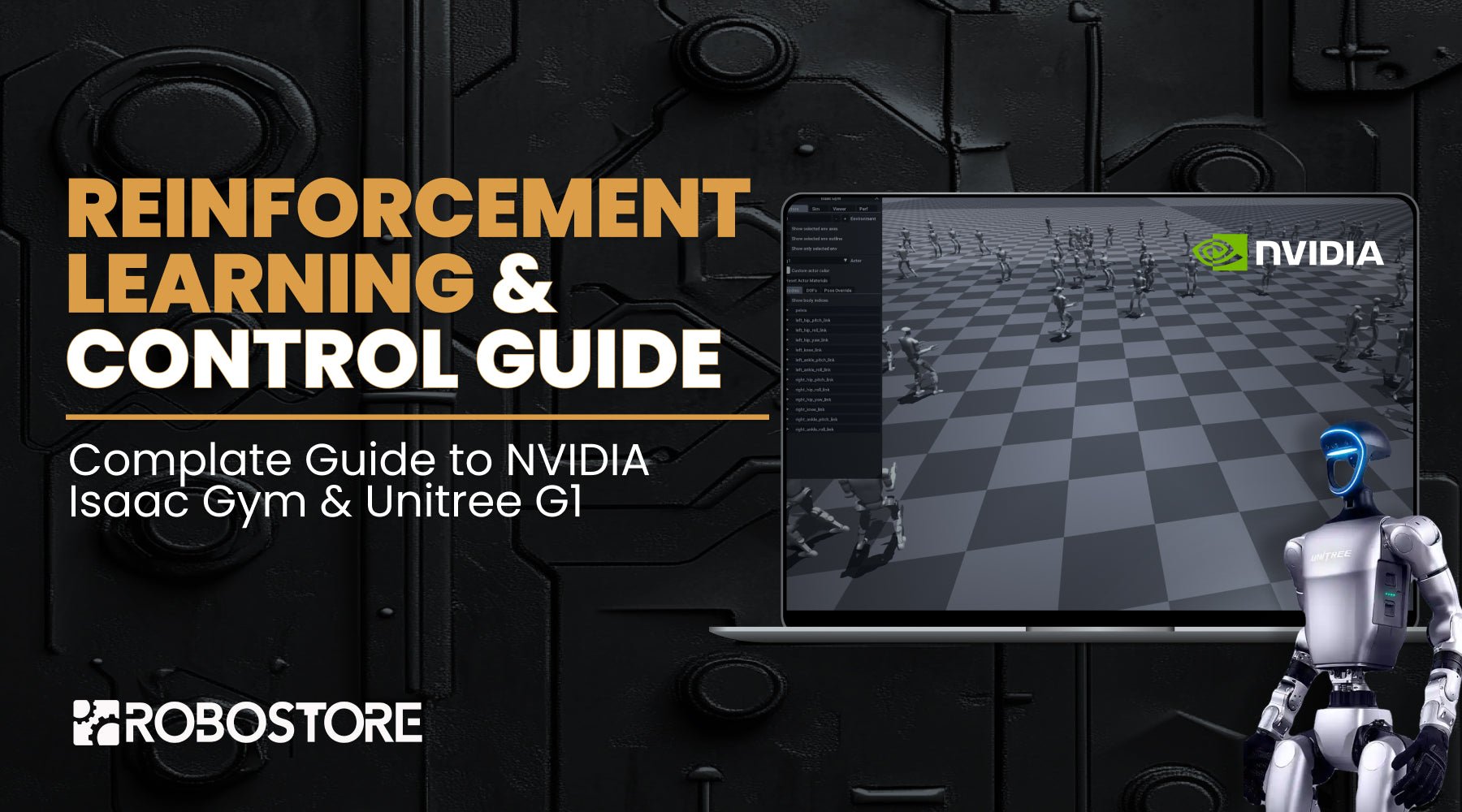
Reinforcement learning (RL) is transforming the robotics landscape, offering new ways to enhance robot autonomy and efficiency. Unitree's G1 robot is at the forefront of this innovation, equipped with a powerful RL control routine. This guide will walk you through the setup and execution of this routine, empowering you to leverage RL in your robotics projects.
Setting Up Your Environment
Before diving into the RL control routine, ensure your development environment is properly set up. This involves:
- Ensuring your Unitree G1 robot and its software are updated to the latest version.
- Installing any necessary dependencies, such as Python and ROS (Robot Operating System), which are crucial for executing the RL algorithms.
Understanding the RL Framework
The RL control routine operates within a well-defined framework that includes states, actions, and rewards:
- States represent the robot's current status or environment.
- Actions are the possible moves the robot can make.
- Rewards are given based on the robot's performance relative to the task.
- Familiarize yourself with these concepts to effectively program and troubleshoot the RL routine.
Implementing the Routine
Implementing the RL control involves coding the behavior you expect from your robot. This typically includes:
- Programming the robot to recognize different states and decide on actions based on predefined algorithms.
- Defining the reward system to train the robot on achieving its tasks efficiently.
Testing and Iteration
After setting up the routine, rigorous testing is crucial. Run the routine in a controlled environment and monitor the robot’s behavior:
- Adjust the algorithm based on performance issues.
- Continuously refine the states, actions, and rewards to optimize the learning process.
Getting Started
Hardware and Software Setup
Before starting, ensure your system is equipped with:
- An NVIDIA RTX series graphics card with at least 8GB of video memory.
- Ubuntu 18/20 with the appropriate NVIDIA driver (version 525 recommended).
Environment Configuration
Set up a robust environment using Conda and install critical packages:
conda create -n rl-g1 python=3.8
conda activate rl-g1
pip3 install torch==1.10.0+cu113 torchvision==0.11.1+cu113 torchaudio==0.10.0+cu113 -f https://download.pytorch.org/whl/cu113/torch_stable.html
Ensure the numpy version is not higher than 1.23.5 to maintain compatibility.
Isaac Gym Installation
Download and install Isaac Gym Preview 4 to simulate the G1 environment:
# Assuming you're in the isaacgym/python directory
pip install -e .
Verify the installation by running a test simulation:
# Run from isaacgym/python/examples
python 1080_balls_of_solitude.py

Install rsl_rl library (use v1.0.2)
git clone https://github.com/leggedrobotics/rsl_rl
cd rsl_rl
git checkout v1.0.2
pip install -e .
Training the Model
Clone the Unitree official sample code and configure your path correctly:
git clone https://github.com/unitreerobotics/unitree_rl_gym.git
# Modify paths in legged_gym/scripts accordingly
Start the RL training within your virtual environment:
conda activate rl-g1
python3 train.py --task=g1
You can adjust the args.headless parameter in train.py to toggle the visual interface on or off.
Testing and Demonstration
After training, test the model to see the robot in action:
python play.py --task=g1
Check out the video :
Following these steps will allow you to effectively implement and refine RL algorithms on the Unitree G1, pushing the boundaries of what your robotic applications can achieve. For more detailed code and configuration settings, refer to the official Unitree guide.


Share:
Unitree G1 Startup Guide: Essential Steps for Setup, Calibration, and Control
Hesai XT16 vs. Mid-360 LiDAR for Unitree Go2 Edu: Enhancing Robotics with Advanced Sensing Technology